|
|
Version: 0.2.0 |
Loading...
Searching...
No Matches
PX4 Example
Table of Contents
1. Setup PX4
1.1. Install QGroundControl
- Install QGroundControl from the link
1.2. Install the PX4 Firmware
- NOTE: Should use specific version of PX4(1.12.3)
- Install the firmware file from the link above which matches with your flight controller
- Open QGroundControl, click the Q Logo, Vehicle Settings
- Click Firmware and upload the downloaded firmware
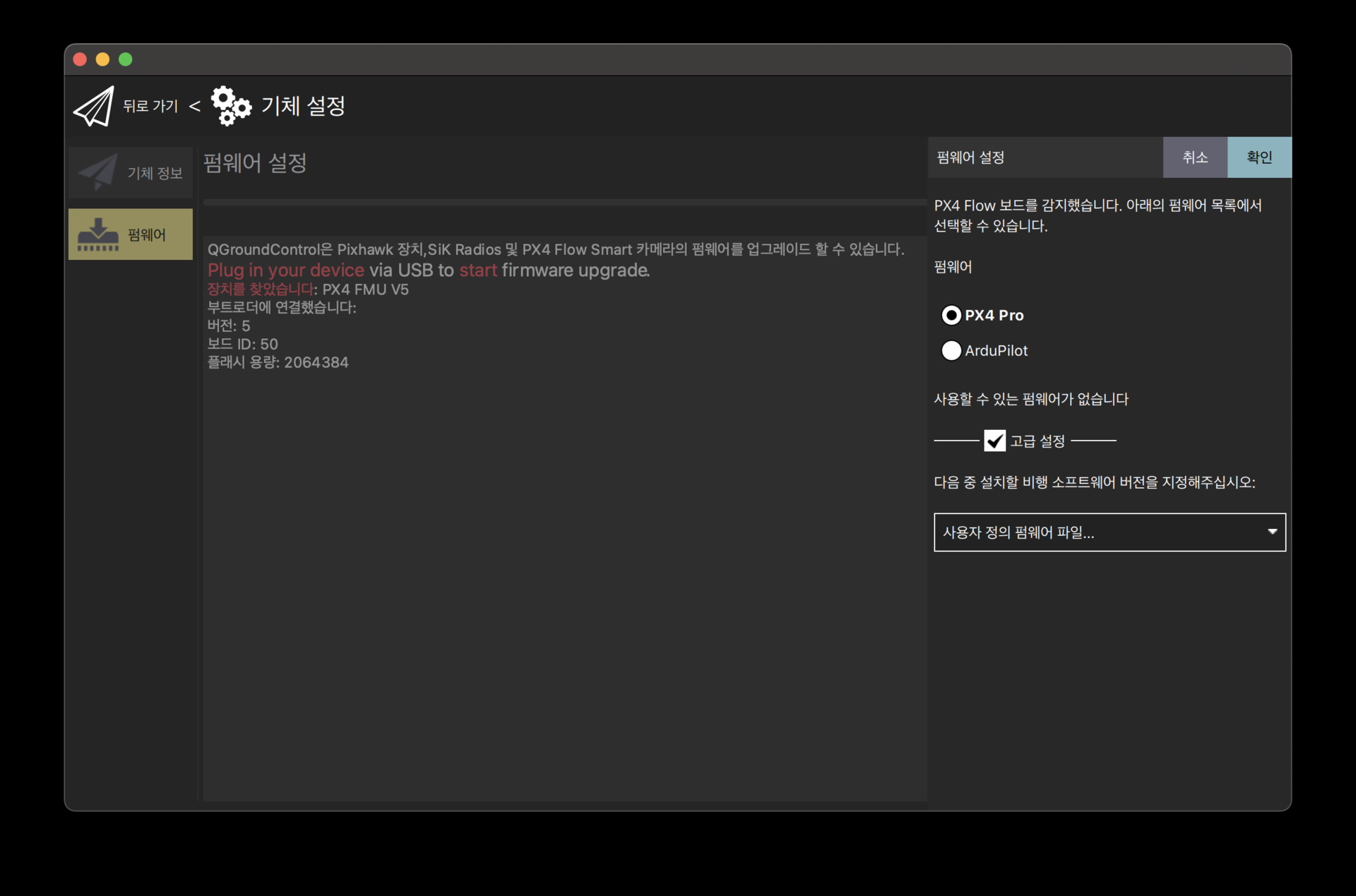
Select Firmware
Setup the flight controller parameters
EKF2_AID_MASKparameter to 24EKF2_HGT_MODEparameter toVisionCP_DISTparameter to-1COM_OBS_AVOIDparamter to0
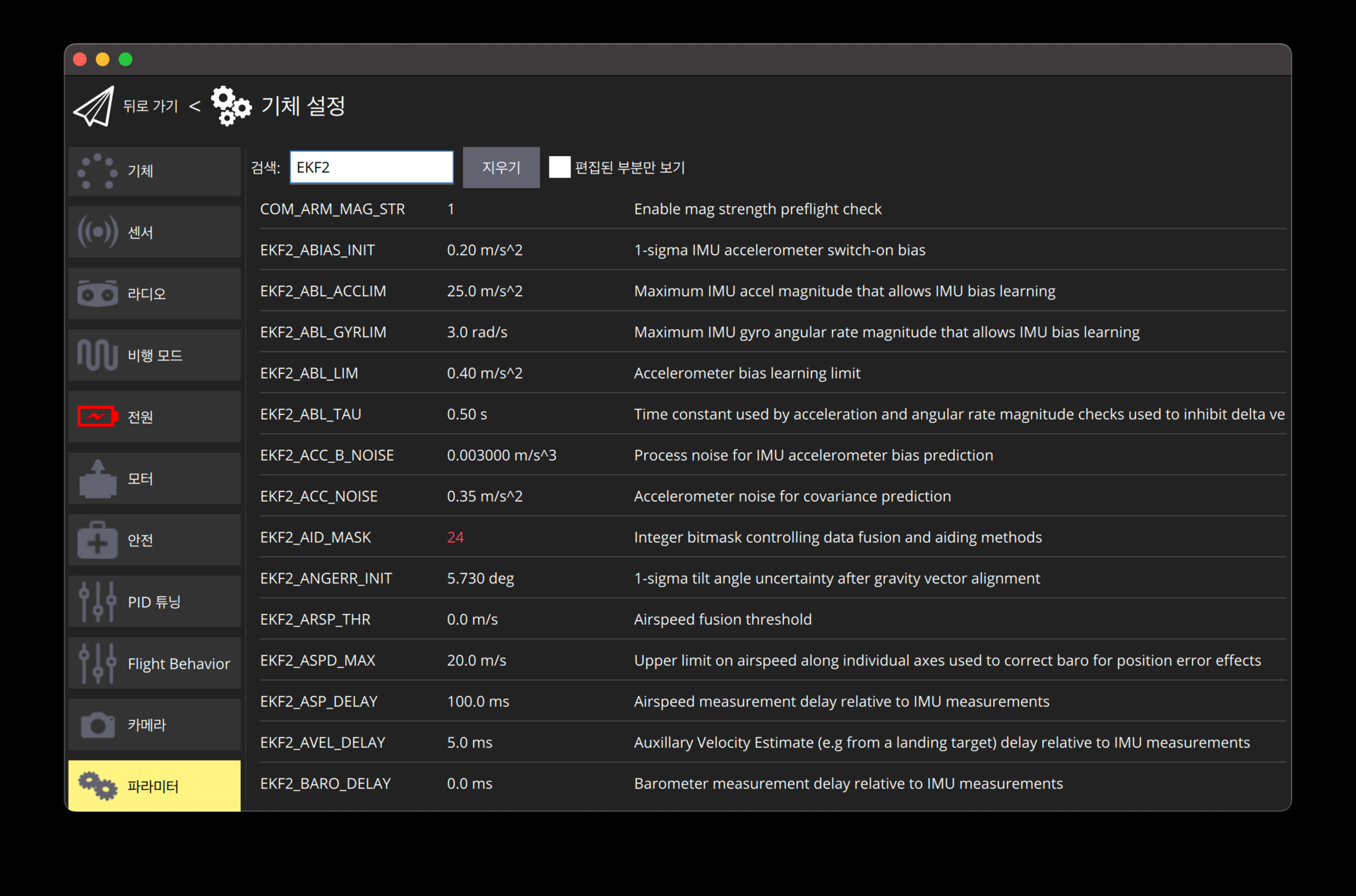
Set AID MASK Parameter
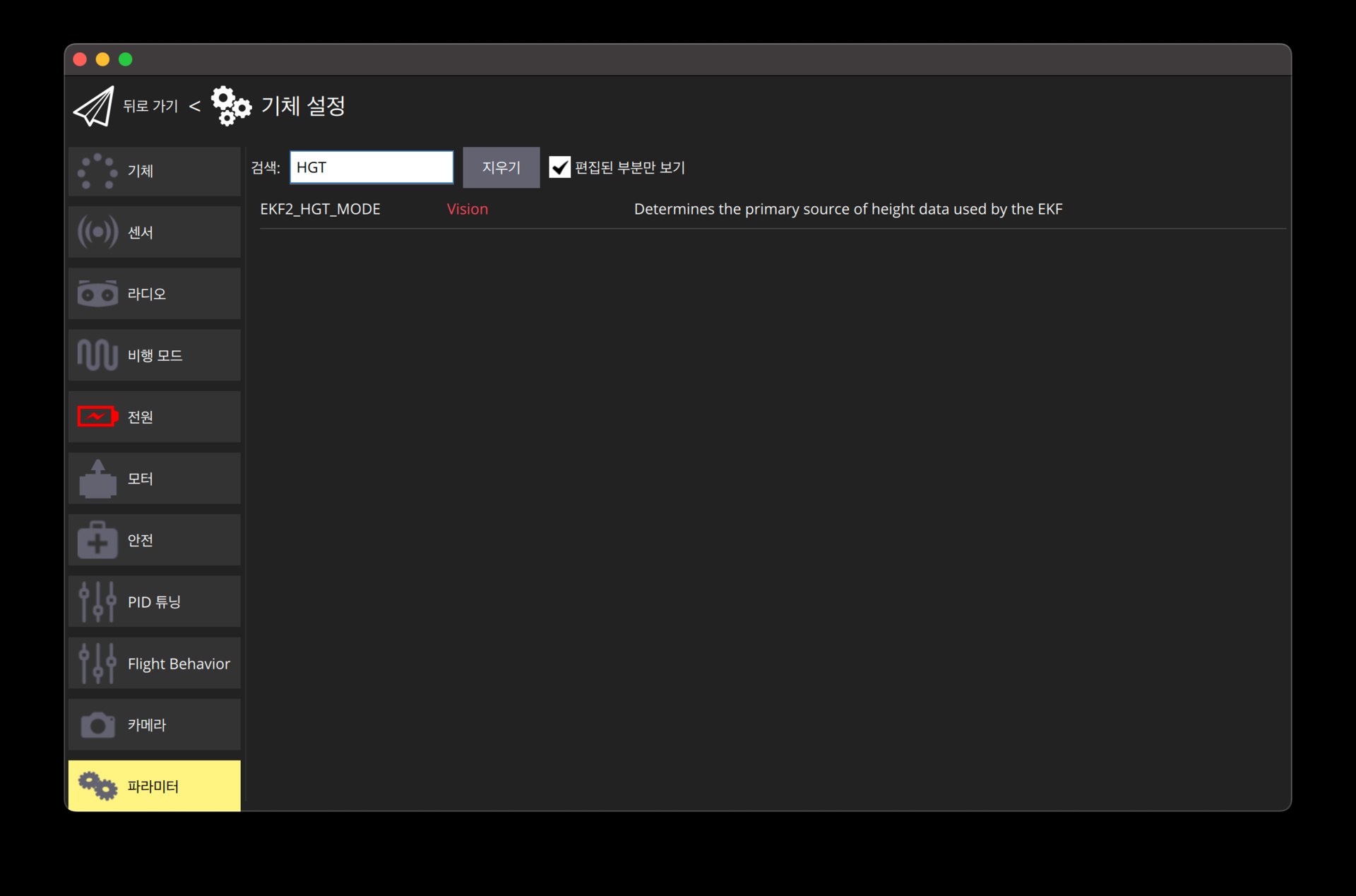
Set Height Mode Parameter
2. Connect PX4 with UART
- To connect PX4 and companion board with uart, use usb-to-tts and connect it to
TEL1on px4 board
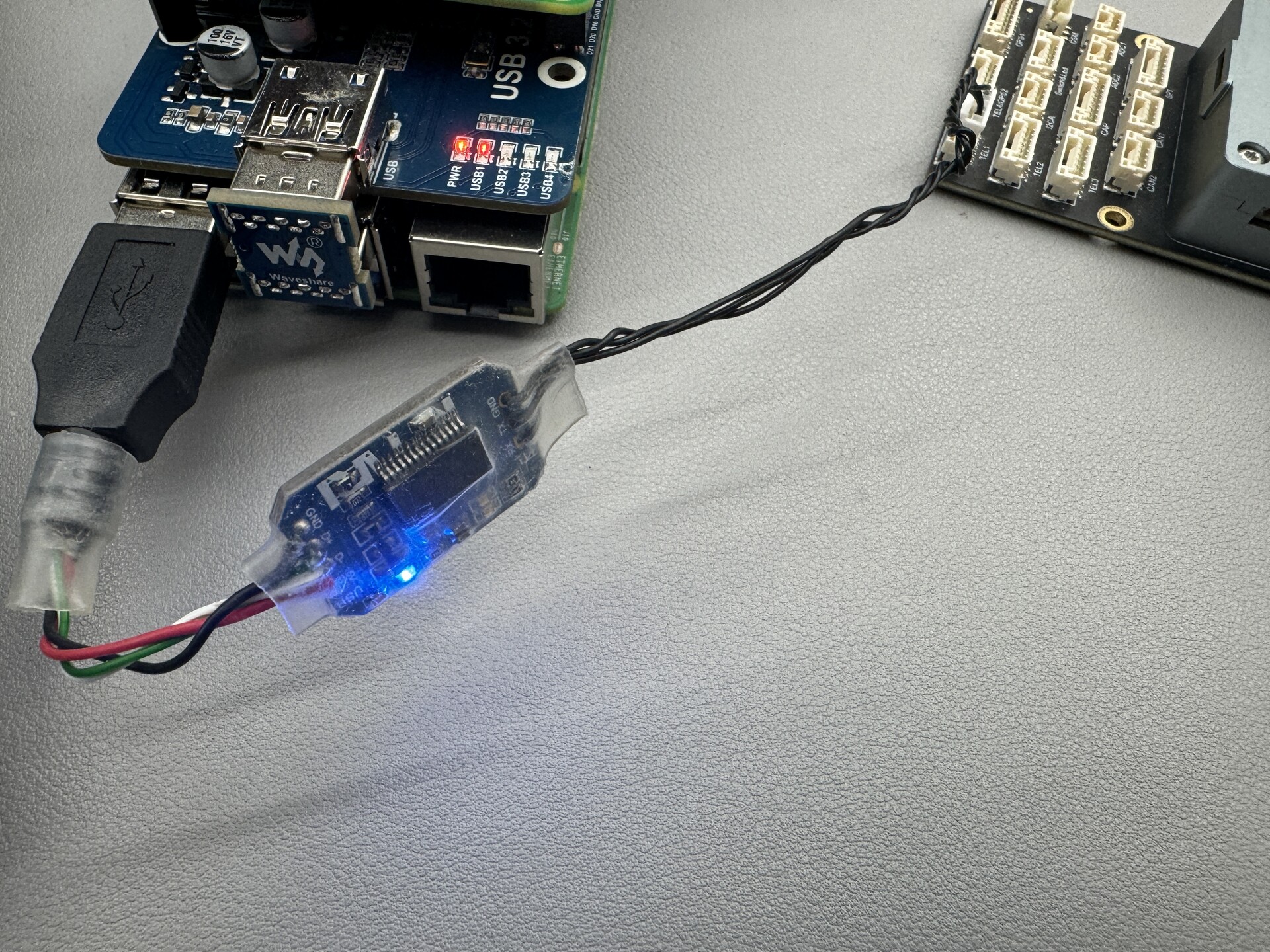
Connect Companion Board with PixHawk
- Then set the port with QGroundContol
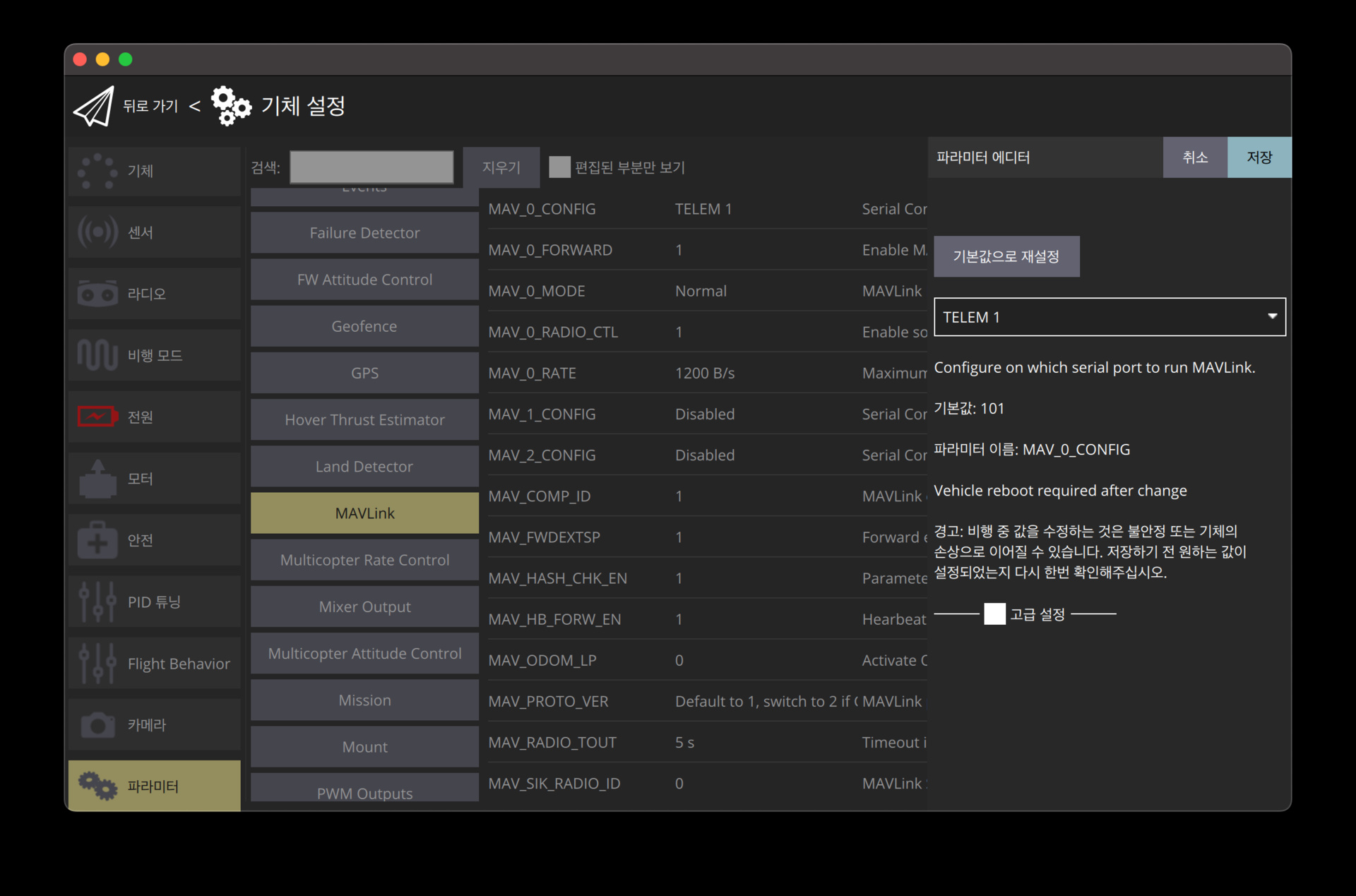
Set Communication Port
- Setting baud rate as same as the SLAMBOX configuration
- Check the SLAMBOX setting
- NOTE: the SLAMBOX's baud rate and PX4's baud rate should be SAME
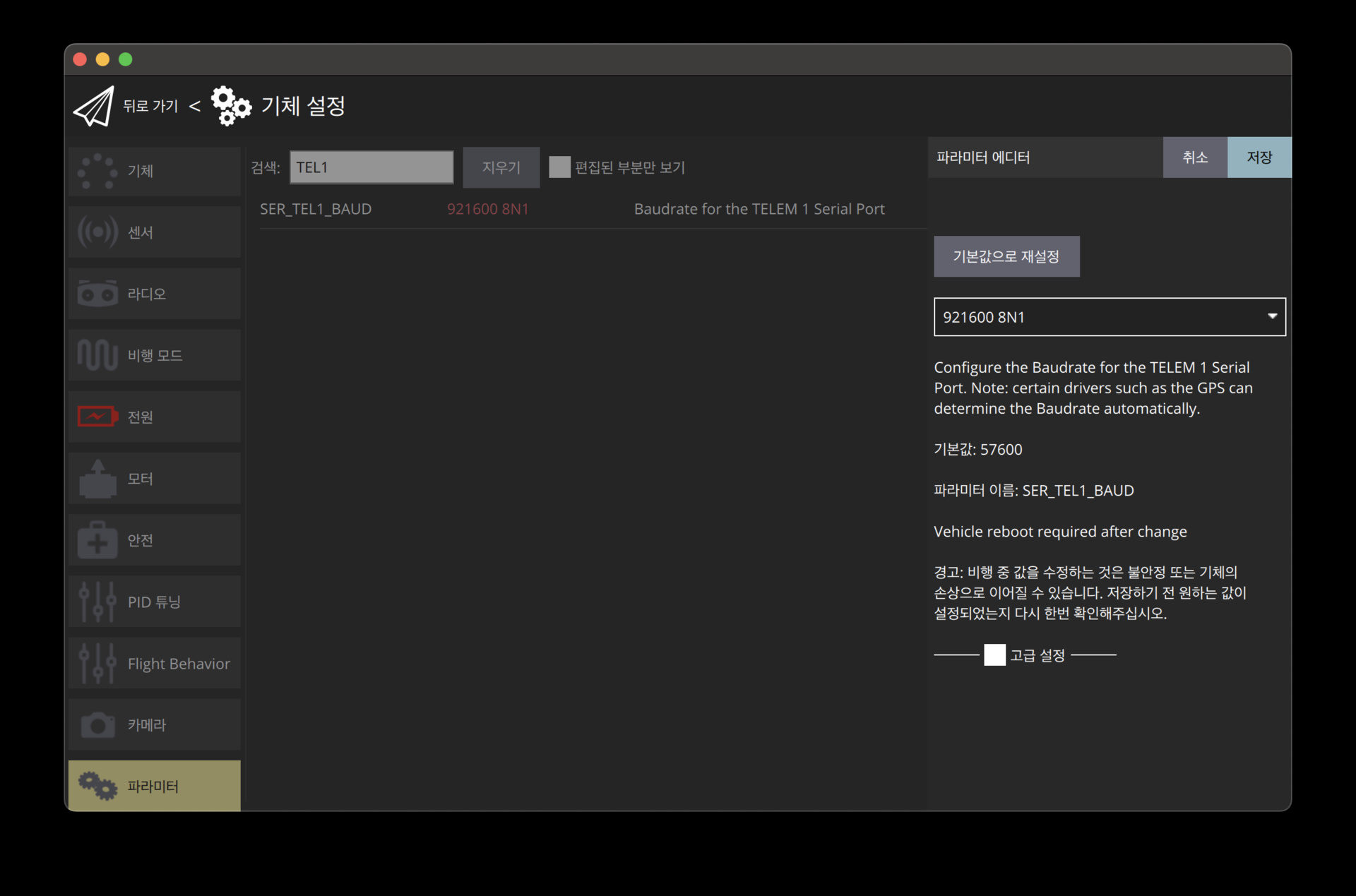
Set Baud Rate
3. Update SLAMBOX Setting
- Update SLAMBOX Mavlink setting with command below
- Check the details here
# Enable Mavlink
$MAVLINK_ENABLE 1#
# Change baudrate
$MAVLINK_BAUD 921600#
# Set Mavlink type to px4
$MAVLINK_TYPE 0#